|
产品名称
Product Name
|
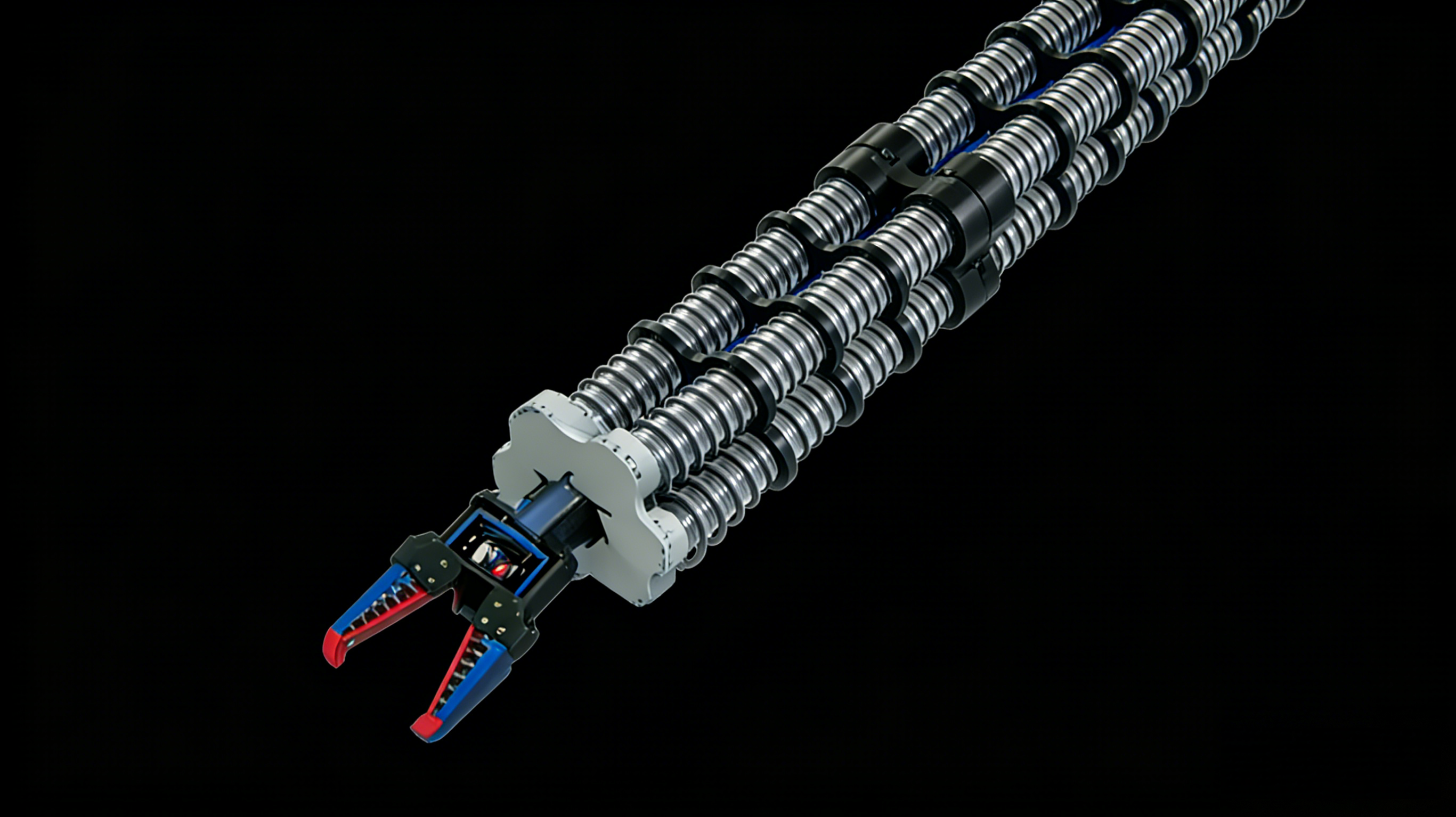
FlexPal 固定式柔性操作平台
FlexPal Fixed Flexible Operation Platform
|
— |
|
产品型号
Product Model
|
启元A1
FlexPal A1
|
— |
|
结构形式
Structure
|
模块化多节串联柔性结构
Modular multi-section series flexible structure
|
— |
|
驱动方式
Drive Method
|
气动柔性驱动
Pneumatic flexible drive
|
— |
|
单节驱动单元数
Single Section Drive Unit Count
|
3/4/6/8 |
个
pcs
|
|
节数
Section Count
|
1–3(视配置而定)
1–3 (depending on configuration)
|
节
sections
|
|
总驱动通道数
Total Drive Channels
|
3/4/6/8/9/12 |
路
channels
|
|
本体材料
Body Material
|
柔性弹性体与轻量化结构复合材料
Flexible elastomer and lightweight structural composite
|
— |
|
最大展开长度
Max Extended Length
|
300–980 |
mm |
|
单节长度
Single Section Length
|
300 |
mm |
|
外径 / 截面尺寸
Outer Diameter / Cross-section
|
40–60 |
mm |
|
单节外径 / 截面尺寸
Single Section Outer Diameter
|
60-95 |
mm |
|
整机重量
Total Weight
|
1.5–4.0(不含外部气源)
1.5–4.0 (excluding external air source)
|
kg |
|
安装方式
Installation Method
|
台式安装 / 支架安装
Desktop / Stand installation
|
— |
|
工作空间范围
Workspace Range
|
半径约 250–700 mm,视节数而定
Radius approx. 250–700 mm, depending on sections
|
— |
|
最大弯曲角度
Max Bending Angle
|
≥90° / 节 |
° |
|
最大末端位移
Max End Displacement
|
200–600 |
mm |
|
额定末端负载
Rated End Load
|
200–500 |
g |
|
最大末端负载
Max End Load
|
800 |
g |
|
重复定位精度
Repeatability
|
±5–10 |
mm |
|
末端定位误差
End Positioning Error
|
5–15(典型值)
5–15 (typical value)
|
mm |
|
姿态控制精度
Attitude Control Accuracy
|
±5–10(典型值)
±5–10 (typical value)
|
° |
|
控制频率
Control Frequency
|
50–100 |
Hz |
|
传感采样频率
Sensor Sampling Frequency
|
50–200 |
Hz |
|
响应时间
Response Time
|
<200 |
ms |
|
单步动作时间
Single Step Action Time
|
0.5–2.0 |
s |
|
工作压力范围
Working Pressure Range
|
-80–80 |
kPa |
|
最大允许压力
Max Allowable Pressure
|
100 |
kPa |
|
气源要求
Air Source Requirement
|
外接压缩空气 / 标准实验室气源
External compressed air / Standard lab air source
|
— |
|
压力控制精度
Pressure Control Accuracy
|
±2–5 |
kPa |
|
长度传感器类型
Length Sensor Type
|
内置长度 / 形变传感
Built-in length / deformation sensing
|
— |
|
IMU 配置
IMU Configuration
|
每模块集成 IMU
IMU integrated per module
|
— |
|
压力传感器配置
Pressure Sensor Configuration
|
每驱动通道独立压力监测
Independent pressure monitoring per drive channel
|
— |
|
是否支持闭环控制
Closed-loop Control Support
|
是
Yes
|
— |
|
控制模式
Control Mode
|
压力闭环 / 长度闭环 / 位姿闭环
Pressure closed-loop / Length closed-loop / Position closed-loop
|
— |
|
通信接口
Communication Interface
|
USB / Ethernet / ROS 2 |
— |
|
软件接口
Software Interface
|
Python API / ROS 2 SDK |
— |
|
视觉系统支持
Vision System Support
|
支持外接视觉系统(可选)
Support external vision system (optional)
|
— |
|
电源需求
Power Requirements
|
220V AC / 视控制柜配置而定
220V AC / Depending on control cabinet configuration
|
V / W |
|
工作环境温度
Operating Environment Temperature
|
0–40 |
℃
°C
|
|
安全特性
Safety Features
|
柔顺接触、过压保护、急停接口
Compliant contact, overpressure protection, emergency stop interface
|
— |
|
典型应用场景
Typical Application Scenarios
|
科研实验、教学演示、柔性抓取、康复辅助研究
Scientific research experiments, teaching demonstrations, flexible grasping, rehabilitation assistance research
|
— |
|
定制能力
Customization Capability
|
支持长度、节数、接口与控制系统定制
Support customization of length, number of sections, interfaces and control systems
|
— |